 城 端 栄 塾 【英検1級】【全国通訳案内士】資格取得講師在籍
さかえ じゅく I hope your dream will come true.
城 端 栄 塾 【英検1級】【全国通訳案内士】資格取得講師在籍
さかえ じゅく I hope your dream will come true.





今回の課題は「犬型歩行ロボ」
ロボットの製作、プログラミング
そのものは簡単なのですが、動作の原理の把握
が難しい・・・。
ロボットを前に進ませるにはどうしたらよいか・・・。
サーボモーターを使って考えていくわけですが、
テキストだけでは理解しにくいと思いました。
私が作成したロボットに一工夫を入れ、それを実際に手動で動かしながら、歩行動作の原理を
つかませる・・・ということをやりながら、本日の課題に挑みました。
まずは、ロボットを製作。
その後、ロボットの前後についている前足、後ろ足の動きをいろいろ考えながら
進めていきました。

← これがロボットの基本部分です。
本日はこれを使って前進させることを
考えていきました。
↓ 以下の動画は、ロボットがうまく進まない
状態(研究段階のもの)です。
ここで、ロボットの前足、後ろ足の動きと 人間の歩く際の動きの違いを考えさせました。
「何が違っているのか・・・ロボットは?(すり足ー地面から両足が離れずにそのまま動いている)
人間はすり足で、前に進む? ・・・・」 などなどヒントを与えながら・・・
しばらくして、人間は(左右交互)に足を上げて前進していることに気がついてくれました。
では、ロボットの動作の場合、どう考えればいいのか・・・。

2つのサーボモーター
・(D9)前足を動かす
・(D10)足をあげる動作を行う部分
が、どれなのか分かりやすくさせ(画像のように)
D9,D10のサーボモーターをそれぞれ
何度にするのかを理解させるために、画像の
ように張り紙(角度が分かりやすいように)
を施しました。

← D9 前足の部分(上から見た状態)
左右ともに前に出ていない状態です。
青線と赤線との角度は垂直=90度

← 同じく D9
左が前(右が後ろ)の状態では
青線と赤線との角度は垂直=120度
画像はありませんが、
左が前(右が後ろ)の状態では
青線と赤線との角度は垂直=60度

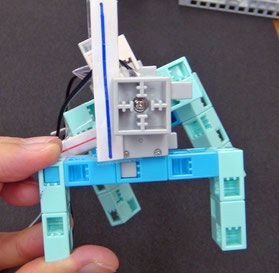
← ロボを真後ろから見た場合
D10がどうなるか・・・・
左を浮かせた場合は画像のとおり
青線と赤線との角度は垂直=110度
← 同じく、ロボを真後ろから見た場合
D10がどうなるか・・・・
右を浮かせた場合は画像のとおり
青線と赤線との角度は垂直=70度
あとは、実際に手動で、私のロボを触りながら、前に進ませるにはどうしたらいいのか。。。
を考えました。 今回は時間がかかったため、1人だけ成功!(以下の動画です)
とりあえず、前進することに成功しましたので、次は「犬型歩行ロボ」ということで、
頭の部分をブロックで製作し、ロボット本体に取り付け犬らしくしました。
そして、そのまま動かしてみると・・・・。(以下の画像)
おしりを左右に大きく振って前進しなくなりました・・・。
ここでまた、なぜ?って考えて、ヒントを出しながらようやく完成! (下記動画)
重心が前に行き過ぎていて、バランスが悪いことに気が付き、尻尾で重さを調整・・・
頭のある前と、後ろの重さを同じくらいにするには、
質問)「ブロックをどうする?」→ 答え) 「同じくらいにする。」
というようなヒントを出して考えていくわけです。
次回は、今日未完成だった生徒に、ここまで完成させてもらい、
サーボモーターを1個追加した「犬型歩行ロボ」に挑戦です。